|
| |
|
|
|
|
|
|
Disclaimer:
Some graphs in the presentation are only shown for didactic purposes and do not reflect real quantities of data.
The author of this article does not take any responsibility in case people use this information. It is at the end the rebreather diver who decides what policy he/she will use for replacing the sensors in his/her unit.
|
|
|
|
1. |
| What is an oxygen sensor? |
• |
the electro-chemical part (the ‘galvanic’ cell) |
• |
the electrical part (circuit board with temperature compensation) |
• |
summary |
|
|
|
|
|
|
3. |
| The ‘near-perfect’ sensor (perfect sensor with finite lifetime) |
|
|
|
4. |
| ‘Real world’ sensors and their failure modes: |
• |
type 1 : current limiting |
• |
type 2 : bad batch |
• |
type 3 : sudden death, high output, variable output |
|
|
|
|
5. |
| Combination of failure modes: the ‘unknown’? |
|
|
|
6. |
| Simulation of different cell replacement scenario: results. |
|
|
|
7. |
| General recommendations for using sensors |
|
|
|
|
|
|
|
|
|
|
|
| What is an oxygen sensor? |
|
| To explain what an oxygen sensor does, and how it works, we will take apart a new sensor and examine the different parts of the sensor. |
|
| On the upper left you see a complete oxygen sensor, on the bottom left the inside of a sensor, when the outer shell/protection is removed. The inside of the sensor shows on top a circuit board with a connector (male molex connector, other types of connectors are sometimes used also), and below the body of the sensor (the ‘galvanic cell’) from where 2 connectors/wires go to the circuit board. |
|
|
|
|
|
|
|
|
|
|
|
| At the bottom side of the body we notice a white ‘membrane’: that is where the ‘oxygen uptake’ takes place |
|
|
|
|
|
|
|
|
|
|
When we remove the circuit board, we notice some electrical components on the ‘bottom side’ of the board. On the other part, the galvanic cell or the ‘electro-chemical’ part, we notice a flexible membrane, covering a liquid, and some electrodes inside.
We now analyse both parts
Part1: electro-chemical part of the sensor (galvanic cell)
To see how it behaves, we will do some tests on this part, and record the results.
We subject the body to 3 different parameters: PPO2, temperature and load: each time we vary one parameter, while we keep the 2 others constant, and we measure the current supplied by the part.
|
|
|
|
|
|
|
|
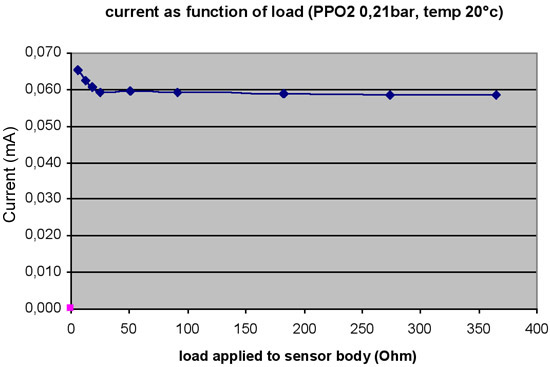
A: Current supplied by the galvanic cell, as function of load, while keeping PPO2 (0.21bar) and temp (20°C) constant
(applying a load to the part means that we connect a resistor between the 2 wires of the body, and then measure the current that goes through the resistor)
|
|
 |
|
We notice that even if we change the load, (the resistance) over a wide range (from 20 ohm till >500 ohm), the current supplied by the body of the sensor, does nearly not change! This first test shows that the body of an oxygen sensor is actually a current source, (and not a voltage source), meaning it tries to deliver a certain current, independent of the resistance it feels against delivering that current. Now if we apply Ohm’s law (U=R x I, the voltage we measure over a resistor is directly linear with the current going through that resistor), it means that we will measure a higher voltage if we increase the total load applied to the sensor body.
(we will come back later to this: but already here you can see where the term ‘current limiting’ comes from, and so that we don’t speak about ‘voltage limiting’)
|
|
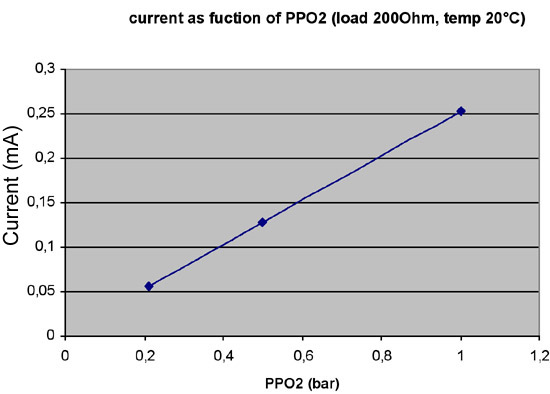
| B: Current supplied by the body of the sensor, as function of PPO2, while keeping load (200 ohm) and temp (20°C) constant |
|
|
|
We notice that when we increase the partial pressure of oxygen of the gas that comes in contact with the membrane of the sensor body, the current supplied by the sensor is increasing, and very linear with the PPO2: at zero PPO2, the current is also zero!
So it becomes clear, that when we apply a load to the sensor body, and we measure the voltage over that load, the voltage we get is directly proportional with the PPO2 of the gas where the sensor is placed…. |
|
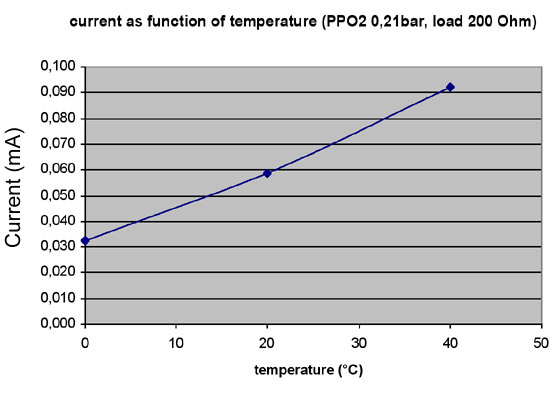
| C: Current supplied by the body of the sensor, as function of temperature, while keeping load (200 ohm) and PPO2 (0.21bar) constant |
|
 |
|
We notice that when we increase the temperature, the current supplied by the sensor body also increases. We see that the increase is not even really linear with the temperature. This is clearly an effect we don’t want to see in a device that should measure the PPO2, as the outcome is clearly influenced by the temperature.
Conclusion: analysis of the ‘sensor body’, the electro-chemical part or the ‘galvanic cell’
The cell is in reality a current source, not a voltage source, that delivers a current that is relatively independent of the load applied to the sensor, that delivers a current that is almost perfectly proportional to the PPO2 applied to the sensor, but that is heavily influenced by temperature. So without controlling the temperature, or compensating the output for temperature changes, we can not use this sensor body for measuring PPO2 in a diving environment.
|
|
|
|
|
|
| Note: the symbol of a current source is: |
|
|
|
|
|
|
Part 2: the circuit board
When we analyse the circuit board, we find a resistor network, consisting of 3 normal resistors, (R1, R2 and R3) and one temperature dependent resistor, or ‘thermistor’: an NTC (meaning a resistor that has a Negative Temperature Coefficient: the value of that resistor (XX ohms) will decrease when the temperature increases!)
Schematically we can draw the circuit like this: (some sensors might have a different organised circuit, we just use this one to explain general sensor build-up)
|
|
|
|
On the left we have the galvanic cell, (the current source), as we analysed in part 1, in the middle the resistor network we find on the circuit board, and on the left, for completeness, the ‘external load’, that sensor manufacturers ask you to add where you measure the output of the sensor.
Now,
|
|
A. |
| Without making complex calculations, (not needed here), if you look carefully at the middle part, the 3 fixed resistors, and the NTC, you can understand that when the temperature increases, (since the resistance of the NTC decreases by increasing temperature), the total resistance of the network will also decrease |
|
|
|
B. |
| We already know that the current supplied by the sensor body is independent of load (so the output of the galvanic cell will not vary just because of changing load), |
|
|
|
|
C. |
| We also saw that the current (I) supplied by the galvanic cell body increases when the temperature increases |
|
|
|
|
D. |
| Following Ohm’s law, U=R x I that says that the voltage over a resistor network equals the product of the resistance and the current |
|
|
|
|
The result is: by correctly choosing the resistor network, in this case, the ‘temp compensation network’, the voltage measured over the network stays constant even with varying temperature, if and only if the increase of the current I (due to temp rise) is exactly compensated by the decrease of the total load R, so that the product of I and R does not change (as long as the PPO2 does not change). (please note that the total load is a result of the resistors of the circuit board, the NTC and the external load RL)
This is the way how temperature influence in an oxygen sensor is compensated: this can only work because the sensor in itself is a current source, and the current can be applied to an ‘adaptive’ resistor network, so that at the end the voltage, measured over this network, is independent of temperature. Typical values of the resistor network are in the order of 100-200 Ohm.
In the schematics you already saw the ‘external load’, that is normally added at the outside of the sensor: now why is it simply not integrated inside on the same circuit board?
Why do we need that external load?
Simply explained, mostly we don’t measure directly at the back of the sensor, on the molex connector, but at some distance in the electronics, the computer or the PPO2 gauge: this means we will have a cable between the sensor and the measuring electronics. To minimise external influence on the measuring results, influences, radiation on the cable etc, (also called noise), it is easier to have a small current flowing through the cable towards the place where we measure, and so at the end of the cable, a resistor is placed (Typical value of the external load RL is 10 kOhm, or 10.000 Ohms)
So, the internal resistor network is chosen this way that it gives the best possible temperature compensation if the exact value of external load as prescribed by the sensor manufacturer is applied to the sensor.
Looking at the values of internal resistor network (total load 100-200 ohm) and the external load (10.000 ohm), you immediately see that 98-99% of the current supplied by the galvanic cell goes through the internal resistor network, and only a very small portion through the external load.
Now we can already clear up one myth:
Disconnecting the sensor from the external load (10k) will not extend the lifetime of the sensor, as all the current goes over the internal network anyway, and the cell does not stop supplying current (and even more: the current the sensor delivers is independent of load!)
General conclusion:
An oxygen sensor is a combination of an electro-chemical part (the current source: the galvanic cell) and a circuit board (the temperature compensating resistor network), arranged in this way that you can measure an output voltage that is almost perfect linear with the PPO2, when you hook on the correct ‘external load’.
|
|
2 The ‘perfect’ sensor,
Just for the start of the following discussion, let’s assume we can make a ‘perfect sensor’. This sensor would always give out the same voltage, perfectly linear and proportional to the PPO2 of the gas it is placed in, independent of temperature, humidity or any other influence. This means you would only have to calibrate it once, when you install the sensor, and never exchange it, because it has eternal lifetime: meaning: the likelihood that that sensor fails in a certain month after production or installation is always zero!
How many of these sensors would we need in a rebreather? Theoretically only one…. But..
At this moment we do not suppose we have perfect connectors, nor perfect electronics that read out the sensor, only our ‘perfect’ sensor, so in order to notice when something else outside the sensor is wrong we need at least 2 sensors, best on 2 complete redundant read-outs, (so that we notice that something is not ok because we see 2 different outputs) or for minimum security in automatic voting systems, at least 3. (this is a different chapter J)
Sadly… we’ve not yet found this ‘perfect’ sensor…
|
|
3 The ‘near’ perfect sensor
Let’s define our ‘near perfect’ sensor as our ‘perfect sensor’ from above, but with one inconvenience: this sensor has an exactly known limited lifetime, say 36 months. The end of lifetime is defined as the moment when our sensor is not behaving anymore as ‘perfect’, meaning it can have any type of failure, zero output, high output, varying, non-linear, limited, whatever, we don’t even have to know what failure it has, we just know that at the age of 36 months, our sensor is end of life.
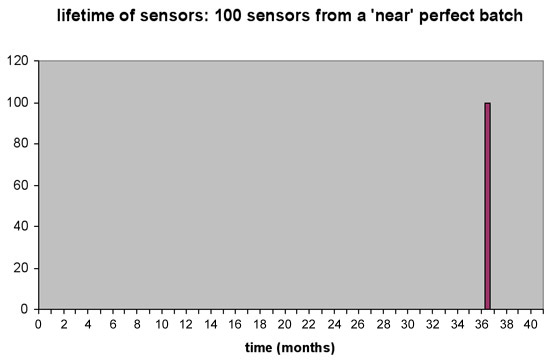
The likelihood of failing of this ‘near perfect’ sensor can be shown graphically like this:
|
|
|
|
The graph shows the results of a test on an imaginary batch of 100 sensors, telling us at what age the sensors stop to behave like ‘perfect’ sensors: you notice they all fail at the exact age of 36 months after production!
Now suppose we KNOW we have sensors of this ‘near perfect’ batch, when do we have to replace the sensors (2 or 3 or more..) in our rebreather?
Well in this case we know they are all perfect till the age of 35, and will all ‘fail in some way’ at the age of 36: so just before the sensors reach the life of 36 months, we take them out of our rebreather and swap them with new/fresh ones… and we can continue for another 35 months..
Easy not?.. but sadly.. even this ‘near perfect’ sensor we never found on the market…
Ok, let’s then move to the more ‘real world’ sensors.
|
|
4 Real World sensors and their failure modes
We will now have a look at different failure modes of ‘real world’ oxygen sensors, what causes them, what are the results and the risks associated with the failure, and what is the likelihood of the failure to happen as a function of the age of the sensor, and the way the sensor is used.
We define a failure on a sensor, as deviation from the ‘perfect sensor behaviour’ in the scope of use of the sensors in rebreathers: linear output in a PPO2 range from 0.21 till 1.60 bar, the absolute value not varying more than a few % over a period of a few days, and in the usable voltage range of the electronics where it is connected to.
|
|
A: type 1 failure: Current limiting
In chapter one, we saw that the galvanic cell of an oxygen sensor delivers a current that is proportional to the PPO2, and that this current is perfectly linear with the PPO2.
In the test we only measured till a PPO2 of 1 bar.
Now when we continue this test with much higher PPO2’s, we will see that this linear behaviour is limited: the current does not keep increasing eternally.
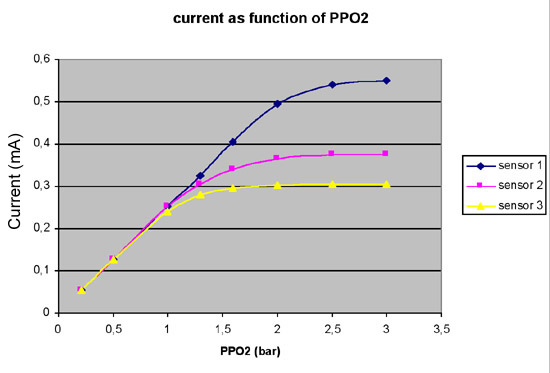
The next graph shows the current as function of PPO2 for 3 different sensors:
|
|
|
|
When we look at sensor 1, we see that the current increases linear with the PPO2 up to +/- 2 bars, and then the curve starts to ‘flatten’: the galvanic cell can not keep supplying an always increasing current when the PPO2 increases: we talk in this case about ‘current limiting’ of an oxygen sensor: there is indeed a limit for the sensor to supply more current.
As a matter of fact, every sensor, even a new sensor right out of the box, is current limited.
But since we only use a sensor in a specific range of PPO2 (normally less then 1.6 bars), we don’t care if the sensor ‘fails’, or shows wrong output, at a PPO2 of 2 or more, as long as it works fine (behaves linear in this case) in the PPO2 range we use it.
For the use in rebreather, we will from now say that a sensor is current limited (and so: failing) when the flattening of the curve starts below 1.6 bar PPO2.
So this means, looking at sensor 1, that we have a ‘perfect’ working sensor, that gives out a voltage that is perfectly linear with the PPO2. (so that when we calibrate our sensor readings at a PPO2 of 1.0 bar, we know that when we read 1.30, it is effectively 1.30 and not more ore less.
So to resume: As long the ‘flattening’ of the curve is outside the region where we use the sensor, no problem.
Now what is the problem if a sensor becomes current limited?
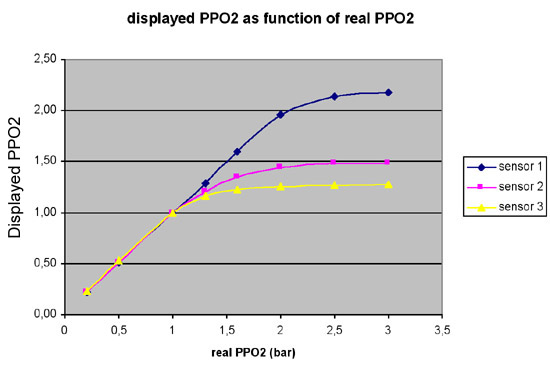
For the ease of explaining we look at the graph where the output voltage (a direct result of the current) of our 3 sensors is converted to a PPO2 read-out: this is what the electronics show us after calibration.
|
|
|
|
Let’s have a look at sensor nr 2: we notice that the output of the sensor is linear up to a PPO2 of 1 bar. Suppose we now calibrate with pure oxygen (at sea level) and we (falsely) assume we have a good sensor: linear till minimum 1.6 bar PPO2.
What will be the displayed PPO2 show at 1.3 bar? Will it be 1.3 times higher then at 1.0 bar where we calibrated (as this is what we assume): no! the output value is lower, if you look carefully at the graph, the sensor will indicate us +/- 1.22. And at a real PPO2 of 1.6 our sensor will indicate us around 1.35 only: so the display will show us a lower PPO2 then reality… not good!
But let’s have a look at sensor nr3.
After calibration, our display shows us 1 bar PPO2: correct: but at higher PPO2, it shows us a value that is far beyond the real value: at 1.3 it shows 1.17, at 1.6 it shows 1.23, and even at a real PPO2 of 3 bars, it even only shows 1.28..
Now imagine you’re diving a rebreather, and at a certain faze of the dive you want to go over to a high PPO2 set-point of 1.3 bar. So you (or your electronic control system) start to inject pure O2 to increase the PPO2 till 1.3…. which it will never reach! No matter how much you inject, how high the real PPO2 will become, your display will not reach 1.3! …
So here lies the real danger of using sensors that are current limited: they show a lower then real PPO2 in the range higher then 1 bar, and it’s possible that the diver does not notice it (even more on electronically controlled rebreathers).
Luckily we use more then one sensor in a rebreather, and the diver can test sensors for current limiting, by injecting pure O2 at a knows depth (6-7 meters) and check if the display shows at least 1.6 bar.
Now why does a sensor get current limited?? Well, when the sensor has reached a certain age where a lot of it’s ‘fuel’ is burned, it can not give very high outputs anymore, and can only produce a certain ‘maximum’ current. And that maximum current even decreases when the cell gets older….
This means that current limiting seems to happen more after the sensor has been used for some time, near the (theoretical) end of life of a sensor, so the likelihood of failure due to current limiting increases when the sensor gets older.
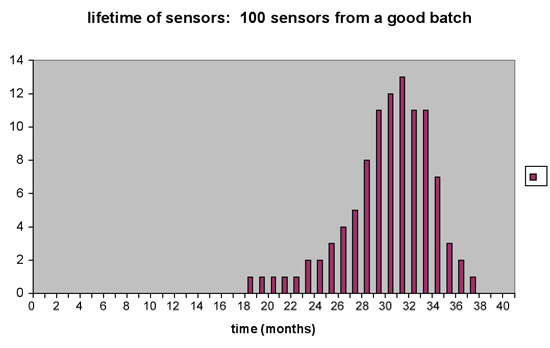
From the past we notice that the average age where a sensor becomes current limited depends fairly strong on the production batch.
We have seen batches of sensors where > 95% of the sensors survived 24 months of usable lifetime, till they became current limited. These we call ‘good’ batches.
|
|
|
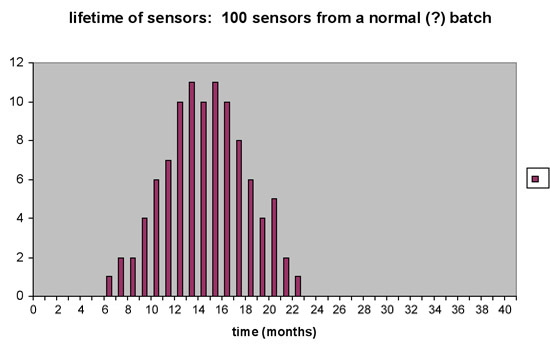
But we’ve seen other batches also, where we were lucky to get an average of 12 months only..
More like this graph…
|
|
Ok, now suppose we have sensors in our rebreather system. With this knowledge, when will we change our sensors? It is not so clear anymore, because it seems that… we don’t know in advance when the sensor will fail… it depends quit a lot on the batch…and how sensors are threated!
Because current limiting occurs when the sensor has already supplied a lot of current, and burned a lot of it’s ‘fuel’, we now also see that the lifetime of a sensor depends on the temperature the sensor is stored: from chapter 1 we learned that the current supplied by the galvanic part of the sensor increases a lot with increasing temperature, meaning the ‘fuel use’ increases with higher temperature! (from the graph in chapter 1: at 40°C twice the ‘fuel consumption’ compared to 10°C)
So don’t be amazed that sensors last longer in cold countries compared to very warm counties…
|
|
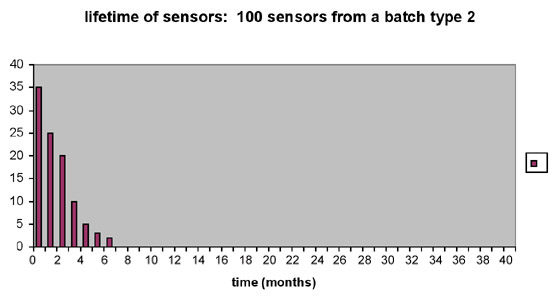
B: type 2 failure : bad batch
From experience in the past we noticed that not all sensors behave ‘nice’ until they have ‘time in use’: this graph shows the lifetime of some batches we got in the years 2006/2007.
|
|
This graph clearly shows a ‘bad production batch’, where sensors start to fail as soon as you put them in the rebreather for no specific reason, besides some internal (??) defect.
Or maybe that batch of sensors is not suited for diving applications, but only for use at 1 atmosphere, so that the multiple pressurisations of the sensor during diving has a dramatic influence on the lifetime of the sensor?
C: type 3 failure: other failures
Some other common type of failures are listed next: for these type of failures there does not immediately seem to be a relation between the age of the sensor, and the likelihood to fail: meaning the graph is more like a constant height over the time-period
|
|
Sudden death
An other type of failure we notice on oxygen sensors, is a sudden output drop to zero or near-zero: this is a failure due to other reason then ‘no more fuel’, as that one you can see coming.
The failure can be due to many reasons: mechanical, a disconnection of wires, a fault on the circuit board, corrosion, a tear in the membrane that holds the ‘liquid fuel’, dropping the sensor from a certain height…
High output
Sometimes a sensor all of a sudden gives an output that is far higher then normal, even sometimes 5 or 10 times more. According to a sensor manufacturer this can be due to small holes in the membrane on the ‘sensing’ side of the sensor, so that more oxygen can be ‘burned’ than in normal operation
Variable output
When the output of a sensor varies so fast that you can not get a stable enough output for a distinct period of time after calibration, at least to complete a full dive….
It is clear from experience in the past, that failures of these last types (type 2 and 3) occur less frequent than the type 1 failure of ‘good’ batches, where the average sensor often has a lifetime of more then 24 months.
5 Combination of failure modes: the ‘unknown’
After all the failure types we have seen in chapter 4, it seems clear that it is not so easy to predict the lifetime of a sensor, as you will not know what the quality of the batch is where your next sensor comes from: will it be more like type 1, or will you have bad luck and get one from type 2, or…
All we can now present is a ‘best guess’ of what the next sensor you buy will be, from the experience of all batches in the past.
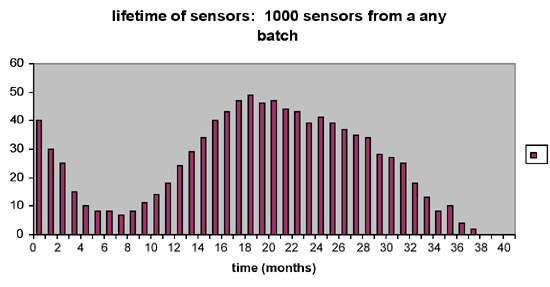
Our best estimate for the prediction of sensor life at this moment looks like this:
|
|
You see at the left side of the curve, the higher likelihood of a failing sensor right after installing (type 2), and more to the right side the typical failing due to age (type 1)
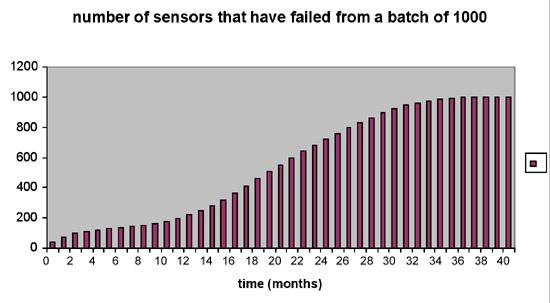
This curve can also be represented in a different form: the cumulative result.
|
|
|
|
This type of graph show the number of cell that have failed before or at the moment of reaching a certain age, out of a batch of 1000 sensors.
It is this graph we will later use for computer simulation, when we want to estimate the lifetime of a sensor: each time we install a new sensor in our rebreather, we let the computer pick a random number between 1 and 1000, and using the graph we get a lifetime prediction for this particular sensor.
6 Simulation of different cell replacement scenario
Now that we have an idea of how sensors fail, we could try to find out what the best policy would be in using sensors in a rebreather, when to change them out, how many sensors we should use etc.
Now defining what a good policy would be, means also defining what result we want to have, or what result we absolutely don’t want to have.
We all accept that a single sensor can fail during a dive: when having sufficient redundancy, this is not a problem.
It is clear that having all sensors fail during the same dive, is the worst that could happen, especially if they would fail in the same way, so that you don’t notice it.. So whatever ‘cell changing policy’ we would use, this result should ‘never’ happen.
The next worse thing is the majority of the sensors in your system failing in some way during a single dive, even more in a fully automatic rebreather, where the computer will mostly take the majority of readings into account when not all readings are the same (‘voting logic’). In this way failing 2 sensors out of 3, is a worse event then 2 out of 4, and surely 2 out of 5. (even failing 2 out of 3 is worse then 3 out of 5, although as we will see later, the latter is an event that is extremely unlikely to happen, where 2 out of 3 belongs to the ‘possibilities’..).
Which ‘cell changing policies’ will we test (simulate):
P1: the standard, widely spread policy, of having 3 sensors in your system, and changing out all the sensors after 12 months: restart every new diving year with fresh sensors. This policy will also be simulated for 4 and 5 sensors in your system.
Do note however, that when putting 3 new sensors in your rebreather at the same time, the likelihood of failure for these 3 sensors is not given by our ‘best estimate of prediction graph’, (which is a representation of possible failure when using sensors from different batches) but by a single graph type 1, 2 or 3: as all sensors in this case come from the same batch, you will notice that the distribution in time is far more concentrated on specific moments in time, which results in a higher likelihood of failing at the same time.
Even more, but not yet in this predictions, having sensors with all exactly the same dive history, increases the likelihood of failing all at a more concentrated moment in time.
P2: the complete extreme on the other side: having 3, 4 or 5 sensors in your rebreather system, but only replacing a particular sensor after it failed during the previous dive.
P3: the system rEvo already advises for some time, ‘rotating sensors’: the system works as follows: as soon as the youngest of all sensors in your system (3, 4 or 5) reaches the age of 6 months, you replace the weakest (the one that reacts the slowest on PPO2 changes, or the one that seems to become closest to current limiting, during the test at 6/7meters), or if you can’t find a ‘weakest’, then the oldest in your system. If of course a sensor fails before the youngest gets 6 months old, you replace it, and the latter one becomes the youngest at that moment.
Ok, now we have our different scenarios, using 3, 4 or 5 sensors in our system, we can ask a whole bunch of divers, to start diving, replace sensors according to our different scenario’s, and report us about their results. To get some usable data, it will take us… a few million dives L…
Luckily we have a computer to simulate all the scenario’s: how does this work?
For each scenario, and for each amount of sensors, we let the computer do 1 million consecutive dives. We assume that we do one dive a week, and we dive each week. We start with all new, fresh sensors, and each time a fresh sensor is put in the rebreather (either at the start, either because a sensor failed, either because it’s time to change a sensor due to our replacement policy), the computer will predict a lifetime for the sensor, using a random generator in the program, and using the ‘cumulative graph’ of sensor failure. (for policy 1 out of a random chosen lifetime prediction of the same single failure type for all 3 sensors, for the other policies out of the graph that represents multiple batches)
As output of our simulation, we will record how often one or more sensors fail during a single dive. Also the total number of sensors used to do a million dives will be recorded. (this allows us to calculate what the average number of sensor are used/year diving, when you apply a specific cell replacement policy.
|
|
|
|
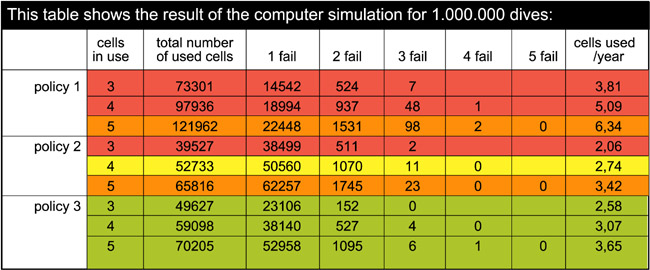
The first column indicates the number of sensors used in the rebreather.
Second column shows the total number of sensors used over 1 million dives, using a specific replacement policy.
The next columns shows how often, on a million dives, the event occurred that 1, 2 or more sensors fail during the same single dive. For example you see from the table that never in any scenario 5 sensors failed during the same dive.
The last column shows the average numbers of sensors used/year of diving, when using a specific replacement scenario: it is clear that when you would have 5 sensors in your rebreather, and you replace them all at the end of the year, you will use the highest number of sensors. The same if you would only use 3 sensors, and you only replace them when they fail, you will use the least number of sensors / year… but you will probably not be safe L.
Now looking carefully at the table, you will already notice:
|
|
A. |
| Whatever replacement policy you use, having all sensors fail in your system, is extremely rare, and when using a good replacement policy, non-existent. (mind you this is not true when doing for example only 1 dive every 3 months, because in that case you will accumulate the possible failures over that longer period, and so increasing the likelihood of failing more sensors at the same time) (Just as an example, if you use policy 2, and you don’t dive for 5 years, you know for sure that in the next dive all sensors will fail!) (but, this does not mean that you can not loose all readings from all sensors for another reason: complete flood, complete electronic failure..) |
|
|
|
B. |
| The more sensors you have in your system, the lesser risk that the ‘majority’ of sensors fails: for example whatever policy you use, there is always a far higher risk of failing 2 out of 3 sensors, than 3 out of 4, or 3 out of 5. |
|
|
|
C. |
| For the same amount of sensors, the more you ‘vary’ in your replacement policy, the lesser sensors you use per diving year. |
|
|
|
D. |
| By choosing the correct replacement policy, you can REDUCE the risk of to many sensors failing at the same time, while ‘consuming’ LESS sensors / year, and even at the same time having more sensors in your system: (for example: in policy 1, using 3 sensors, the risk is far higher to have 2 fail out of 3, compared to policy 3, using 5 sensors, to loose 3 out of 5, but in the latter system we consume less sensors/year). |
|
|
|
7 General recommendations for using sensors
First: we have till now only been looking at failure of the sensor, not the electronics that are attached to the sensors. It is clear that whatever number of sensors you use, whatever replacement policy you use: if you connect all your sensors to the same electronics, if that electronics fails, all outputs from your sensors become useless, as you can not use them anymore….
Recommendation 1: if you can: connect the number of sensors you use to different electronics, so that you create redundancy, and that the likelihood of loosing all sensor data, due to an electronic failure, decreases.
Recommendation 2: check your sensors on a regular basis against current limiting: this is a type of failure that can be detected, even before it becomes problematic: even a sensor that is limited to a PPO2 of 1.55 bar, will still function ok at 1.30, but you will replace that sensor before the current limiting becomes more pronounced.
Recommendation 3: if a sensor is still working ok, even if it is getting older, it’s always better to keep it as extra (redundant) sensor in your system, always better then simply throwing it away (?? Why throw away a good working sensor??): so if you can, use the maximum number of (good!) sensors the system allows you to: as this allows you to have enough sensors in your rebreather, so that you can apply THRUE redundancy: up to sensor level (meaning not even sensors shared by multiple electronic systems)
This now brings us to recommendations for different systems:
Recommendation 4 : systems that contain maximum 3 sensors.
- e/hCCR: never replace your sensors all at the same time: it is clear that when you do that, there is a reasonable possibility to have 2 sensors fail at the same time: 1 in 2000 dives: and in reality this likelihood is even higher (see later)
It is clear that P3 is always a safer system. Even if you believe that a sensor in your rebreather should never be more then 12 months old, then apply P3 but install a fresh sensor every 4 months: this will however only give you a marginal decrease in failing 2 sensors out of 3, compared to the larger consumption of sensors /year
- mCCR: the likelihood that a dual sensor failure is detected by the diver is higher then in the eCCR. In this case there is clearly no reason not to use P3.
Recommendation 5 : systems that contain at least 4 sensors, and minimum 2 redundant electronics
- independent of mCCR or e/hCCR, using 4 or more sensors and replacement policy P3 always results in a higher probability of having at least 2 good working sensors in your system, compared to the standard 3SP1, with the extra advantage of using less sensors / year.
Even in the 5SP3 you consume less sensors/year as in the 3SP1, and in any condition you will always have more working sensors than in 3SP1.
Even when using 5 sensors in your system, you could opt for P2, only throwing away when they fail (see table), but since this only gives us a marginal decrease of sensor consumption, there is no reason to prefer P2 over P3.
For systems that can contain 4 or 5 sensors:
• mCCR: start with 3 sensors, on 2 different electronic systems, and add sensors according to P3, until you can not add anymore, because all sensor places in your system are taken, and then start replacing according to P3, throwing away the oldest, unless you clearly have seen a ‘weaker, slower responding’ sensor during the last dives.
• e/hCCR: same as for mCCR, but start with 4 sensors, as you need 3 sensors for the voting electronics, and at least one for the redundant electronic (display/HUD). Eventually, to reduce the risk of multiple failure in the beginning of the ‘addition’ system, because at the start you have often no other choice then starting with sensors from the same batch, you could add the first sensor after _ months, and then start replacing every 6 months.
Using 5 sensors even has another advantage: at the moment a sensor would fail, you have time to buy another sensor, so that you always start with real fresh sensors: you don’t have to keep them on stock if you don’t want to: as we have seen running the unit on 4 working sensors is always a better alternative then using the 3SP1 scenario.
Recommendation 6 : it was shown that sensors supply a higher current (‘burn more fuel’) when the temperature is higher: if you can, store your unit in a cooled room. However, it is not recommended to take sensors out of the rebreather after diving, to store them separately in a cooler, as the likelihood of mechanical failures increase this way. Also know that most connectors have a limited number of ‘connecting actions’.
Recommendation 7 : when you install a new sensor in your system, write the installation date on the sensor, so that you know which one is the youngest. In our study it was assumed that the service life of a sensor started when it was taken out of the sealed bag, as supplied by the manufacturers. This seems correct as long as the production date was less then one year before installation.
The production date of sensors is printed on the sensors, in different ways. Two common methods are:
- 3 numbers where the first indicates the last number of the production year, and the 2 others the month (example: 805XXX : 5th month of 2008, or may 2008)
- a letter followed by a number, where the letter indicates the month, and the number the last number of the year (example: A8 : January 2008)
8 Remarks
People might argue that the figures on the table for having multiple sensors fail at the same moment, seems low. They are right, in reality it can be that some events occur more often, but then it is not due to the sensor only, but to some other event that has influenced all sensors at the same time, or due to the electronics around the sensors
Such events will even force sensors to start acting in the same way, and in this way again increase the likelihood of sensors failing at the same time when they have exactly the same age and more important: the same dive history!
For example if you flooded your unit completely, and you think you can still use your old sensors after a good rinsing, there is a higher then normal possibility that multiple sensors will fail in the next dives… independent of any replacement policy!
|
|
Same for non-redundant electronics, or non-redundant wiring systems: these can make multiple sensor outputs fail, but again this is not related to the replacement policy.
That is of course the reason why it is better to have redundant electronics: if not a good replacement policy, and having good sensors, will be completely undone by a badly designed electronic system.
• People might also argue that the probability curve of sensor failure is not known correctly, and can change any moment: better/different sensors come on the market. That is correct, and for that reason, a simulation was also made for another failure curve that represents better batches. The results of this simulation gave the same recommendation at the end, and even stronger: the more the sensor batches tend to be good, more to the ‘type 1’ failure curve of a ‘good’ batch, the more P3 is preferred over P1.
• Another argument is that people don’t continuously keep diving and replacing sensors according to a certain policy, but that at certain moments a ‘restart’ or a refresh of all sensors is done: for example when a unit is sold, or when it gets a complete revision. To take that into account, simulations were done where a complete refresh of all sensors, just like starting with a new unit, was done, one simulation after every 5 years, one simulation after every 8 years. Again the recommendation stayed the same as in chapter 7.
• And, why not use more then 5 sensors then? 6 or 7… There seems no need to, as long as you can spread the sensors over different systems, the likelihood that more then 2 fail is very low anyway, but your total consumption of sensors/year will increase. And in most cases, when adding sensors every 6 months, and keeping more then 5 sensors in your system, the oldest sensors will have failed before they should be replaced because of lack of place.
Lastly, remember that essentially sensors are made for use at 1 atmosphere: they were not originally designed to be pressurised and depressurised multiple times. It is not exactly known at this moment what the influence is of this, but there is a belief that ‘compression’ and ‘decompression’ also causes mechanical stress on parts of the sensor, that also decreases the lifetime: again more reason to have as much as possible sensors with different diving history in your rebreather.
|
|
|
|
|
|
|
|
|
| |
|